近日,我系教师赵鹏飞在驱动传感一体化人工肌肉领域取得重要进展。研究成果以“Study on the Twisted and Coiled Polymer Actuator with Strain Self-Sensing Ability”为题发表在国际知名期刊《ACS Applied Materials & Interfaces》上(DOI: 10.1021/acsami.0c01179)。该杂志2018年影响因子为8.456,为中科院分区一区Top期刊。
在很多人类不便直接介入的特殊场合,软体机器人正扮演着越来越重要的角色。然而,软体机器人在与“真手”的“较量”上主要存在两点问题:1.软体机器人能否像人或动物的肌肉般强韧?2.软体机器人能否像“手”那样自带传感功能?
作者利用电活性螺旋卷绕型人工肌肉和二维光子晶体,成功实现了自带传感功能的柔性人工肌肉。他们设计出的人工肌肉在变形时会通过颜色实时反映其变形和应变量。同时,该人工肌肉通过100 mA以下的电流即可成功驱动,堪称“智能高效的人工肌肉”。
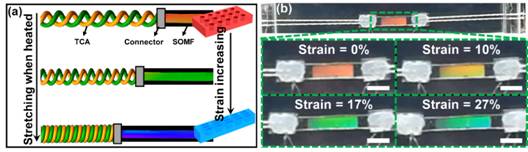
图:驱动传感一体化人工肌肉的机理及样品实物图
该研究的意义在于,通过简单的制备过程即可得到自带传感功能的高集成度柔性人工肌肉,填补了人工肌肉在应变自显示方面的空白,极大地提升了驱动与传感功能的集成度,对于实现驱动传感一体化的仿生器件具有重要的启示作用。
该成果的发表,填补了公司在软体机器人与智能材料领域研究的空白,为后期在该领域的研究奠定了基础。
该成果由公司与西安交通大学共同完成,公司澳门bet356体育在线官网赵鹏飞老师为该文章第一作者。研究工作得到了国家自然科学基金共融机器人重大研究计划培育项目及山西省高等学院科技创新项目的资助。
文章链接:https://pubs.acs.org/doi/10.1021/acsami.0c01179


